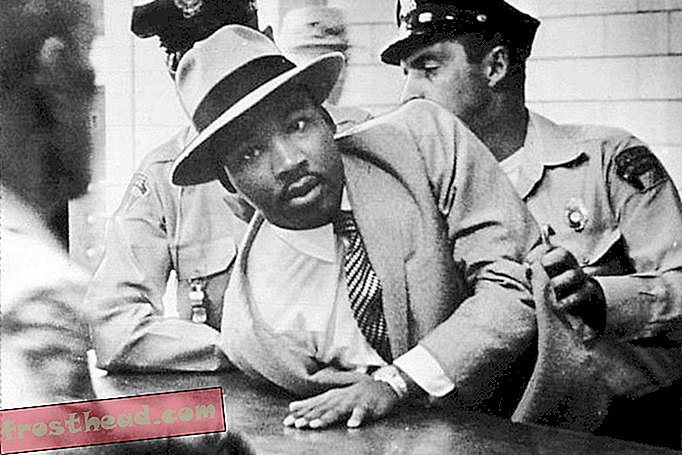
Новый робот натыкается на неровную поверхность по образцу ящерицы с зебрами. Изображение предоставлено Чэнь Ли, Тиннан Чжан, Даниэль Голдман
Разработка робота, который может легко перемещаться по рыхлой местности, скажем, роверу, предназначенному для пересечения поверхности Марса, представляет собой уникальную инженерную задачу: колеса обычно погружаются в то, что инженеры называют «текучей землей» (смеси песка, почвы, грязи и травы ).
Учитывая многочисленные биологически вдохновленные инновации в робототехнике, у команды исследователей из Georgia Tech возникла идея - создать дизайн на основе пустынных существ, таких как ящерицы с зебра-хвостом, которые способны карабкаться по рыхлой песчаной поверхности без замедления. Их усилия позволили им создать это маленькое шестиногое устройство, представленное в статье, опубликованной сегодня в журнале Science, которое может перебегать по зернистой поверхности таким способом, который странным образом напоминает рептилию.
Исследовательская группа во главе с Чэнь Ли разработала устройство после изучения передвижения различных существ и математического моделирования характеристик различных типов ног (различающихся по количеству, форме и длине) в нескольких различных средах. Они надеются, что их исследования будут стимулировать разработку области, которую они назвали «террадинамикой» - поскольку аэродинамика связана с эксплуатацией крылатых транспортных средств в воздухе, их поле будет изучать движение транспортных средств на ножках на гранулированных поверхностях.
Для разработки своего робота они использовали эти симуляции, чтобы определить точную длину ног, скорости движения и уровни силы, которые могли бы продвигать устройства через свободную поверхность, не заставляя их погружаться слишком глубоко. Затем они распечатали различные типы ножек на 3D-принтере и создали роботов для проверки их в лаборатории.
Один из их наиболее интересных выводов заключается в том, что одни и те же типы принципов проектирования применяются для передвижения по различным гранулированным поверхностям, включая семена мака, стеклянные шарики и натуральный песок. Их моделирование и эксперименты в реальном мире показали, что С-образные ноги в целом работали лучше, но что любой тип изогнутых конечностей работал относительно хорошо, потому что они распределяли вес устройства по длинным (хотя и узким) поверхностям ног, когда ноги приходят в контакте с землей в течение шага.

Исследователи обнаружили, что С-образные конечности лучше всего подходят для быстрого перемещения по гранулированным поверхностям, как у ящериц, так и у роботов. Пунктирные, сплошные и пунктирные изображения в C и D - ранние, средние и поздние положения ног во время шага. Стрелки указывают направления движения для определенных областей ног. Изображение через Science / Li et. и др.
Применения такого рода исследований широки: этот конкретный робот, по словам исследователей, может быть превращен в полезное поисково-спасательное или разведывательное устройство, в то время как принципы, полученные из области террадинамики, могут быть полезны при разработке зондов для исследования других планеты в будущем. Они также могли бы помочь биологам лучше понять, как формы жизни здесь, на Земле, эволюционировали, чтобы перемещаться по поверхности нашей планеты.